Projektbeispiel Portalroboter
Hintergrund
Ein Portalroboter führt Bewegungen mit hohen Lasten und Beschleunigungen aus. Ein vorhandenes Gestell zeigt elastische Verformungen und Schwingungen, die Taktzeit und Positioniergenauigkeit des Roboters begrenzen.
Ziele
- Erhöhung der Gestellsteifigkeit / geringe Gestellschwingungen
- Geringe Gestellkosten (Teileanzahl)
- Große Zugangsflächen
Weg
- Simulation der Gestellbelastung durch die Roboterbewegung
- Simulation der Gestellverformung unter Last
- Ermittlung der Belastung einzelner Gestellteile für verschiedene Handhabungsaufgaben und Betriebszustände
- Analyse des Schwingungsverhaltens des Gestells (rechnerische Modalanalyse)
- Analyse verschiedener Konstruktionsvarianten
- Optimierung der Gestellstruktur einer Variante
Ergebnis
- Optimierte Gestellstruktur
- Hohe Gestellsteifigkeit gegen statische und dynamische Belastungen
- Reduzierte Gestellkosten infolge verringerter Teileanzahl
- Hinweise zur schwingungsoptimalen Achsensteuerung
Nutzen
- Wettbewerbsvorteil durch höhere Taktzeiten / schnellere Greiferpositionierung
- Reduzierung von Entwicklungszeit und -kosten durch Verringerung des Versuchsaufwandes
- Fundierte Faktenbasis für Entwicklungsentscheidungen
Handhabungszelle mit Gestellkräften (rote Pfeile) während Roboterbewegung
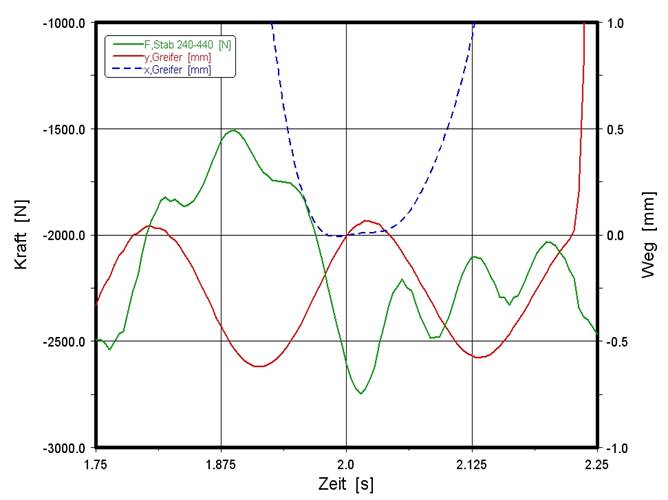
Greiferschwingung und Belastung eines Gestellteils während einer Positionierbewegung
Eine der Schwingungseigenformen des Gestells (Ergebnis einer rechnerischen Modalanalyse; Verformungen stark vergrößert)